带时间窗的取送货路径规划问题PDPTW
1.问题描述
带时间窗的取送货路径规划问题(pickup and delivery problem with time window,PDPTW)是路径规划问题的一个重要子类,在供应链领域比较常见,例如某物流企业需要指定交易未来某段时间内车辆的运输调度计划,在满足货物运输要求前提下最小化运输成本。
(1)对车辆,已知起始停靠点,结束停靠点,最早开始时间,最晚结束时间,最大行驶距离,速度,最大载量,匹配关系等信息
(2)对订单,已知货物量,提货地点,提货服务时间,提货时间窗,送货地点,送货服务时间,送货时间窗,匹配关系等信息
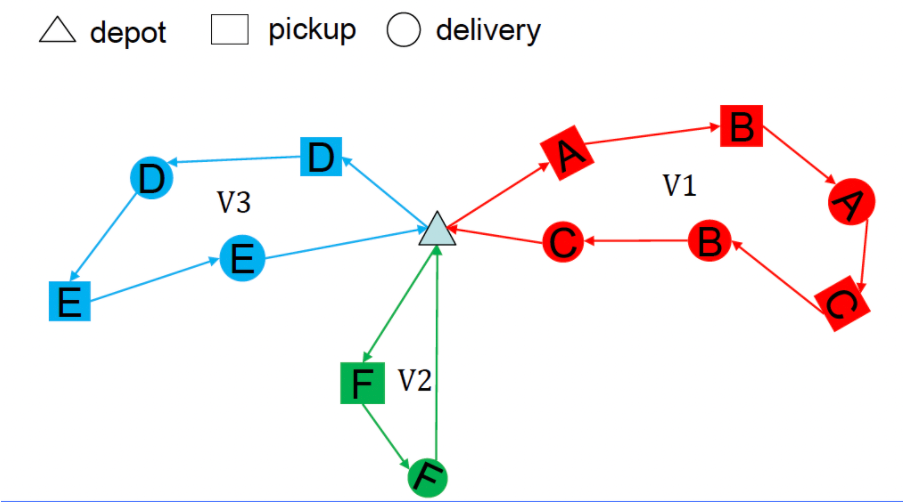
所有车辆从其对应的起始停靠点,依次取送货,最后回到结束停靠点,假设有V1,V2,V3三辆车,六个订单A,B,C,D,E,F。运输路径用图表示如下:
2.数据分析
数据有3张表:地点信息表,车辆信息表,订单信息表
(1)地点信息表:所有订单可能取送货的地点,包括停靠点ID,纬度和经度
(2)车辆信息表:可用车辆的信息,包括每辆车的起始和结束点,服务时间,时间和距离限制,运输速度,单位成本,匹配关系等

(3)订单信息表:要取送货的订单集合,包括每个订单的取送货时间窗,服务时间,取送货地点,匹配关系等

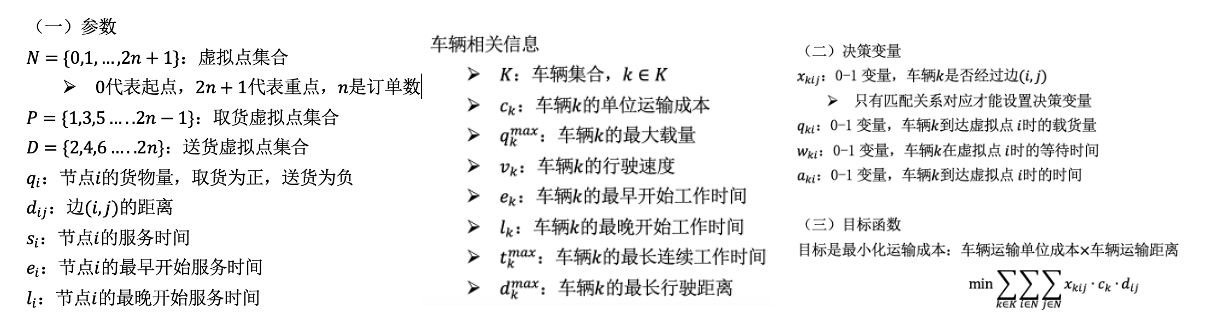
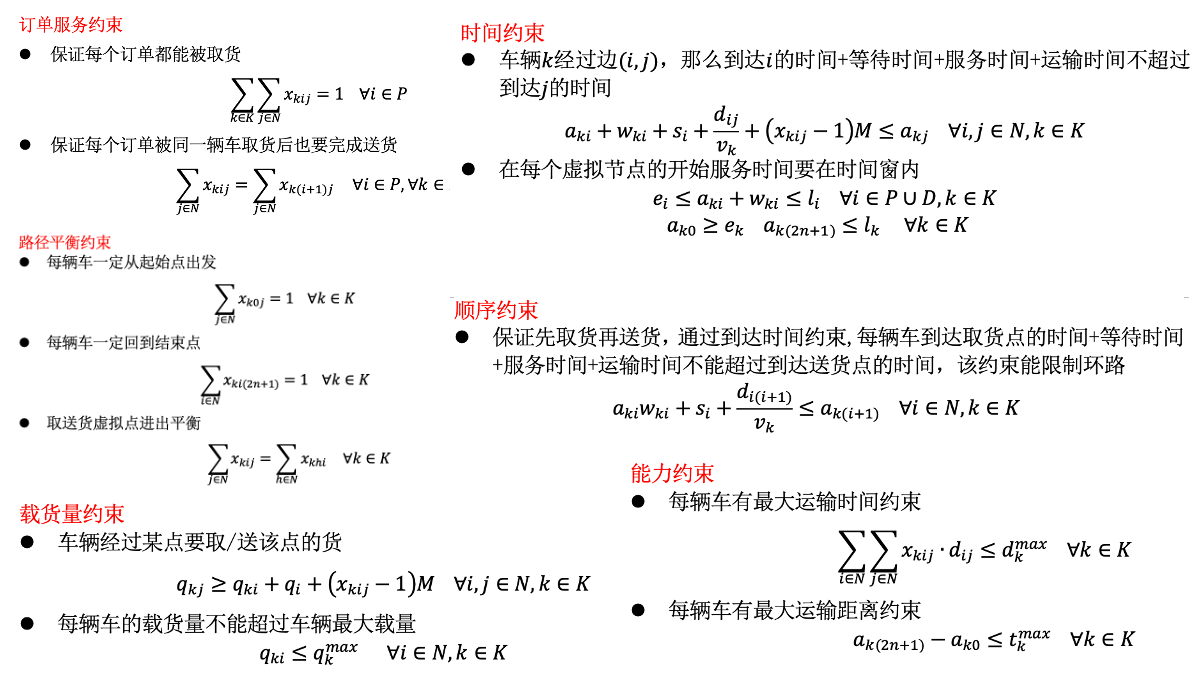
3.数学模型
对于数学模型,首先要明确想要模型求解出什么信息?有一些是目标的决策变量,有一些是辅助的决策变量。在该问题中,我们想知道每辆车负责运输那些订单,这些订单的运输线路是那样的?那么最直观的建模思路是:(1)用一个0-1变量来表示是否运输该订单(2)用另一个0-1变量来表示在选中的订单中的运输边。但是(2)实际上已经包括(1),因为选中了某条运输边,就代表这个运输边包含的订单也被选中;并且在Gurobi建模中决策变量不能作为索引,即不能通过(1)的信息来约束(2)。
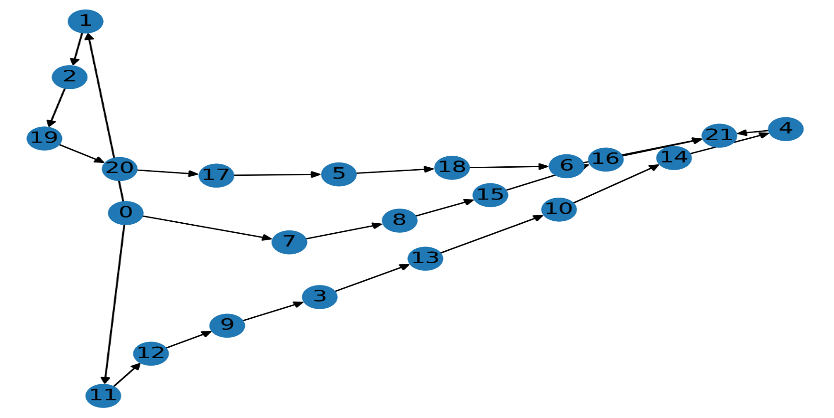
换成另一个建模思路:对每辆车,获取匹配关系对应的订单的取送货候选点集合,该车辆只会经过该候选点集合组成的边。如果候选点集合是真实的地点,那么会出现一个真实地点比如L1会有多个订单都经过,即L1在多辆车的候选点集合中,决策变量只会体现出是否经过L1,但是不清楚经过L1取哪个订单,因此候选点集合不能是真实的地点,而是虚拟的地点,即假设每个订单的取送货点都是独立的,但是计算距离时采用虚拟点对应真实点的经纬度。
对每辆车:虚拟点包括起始虚拟点,结束虚拟点,取送货虚拟点。
4.代码实现
以下代码建模部分用pulp库实现,可支持调用多种求解器(cplex, gurobi等)进行求解,完整代码在github:Routing-Problem/PDPTW
(1)数据预处理System:对数据进行预处理,获取建模所需的数据信息
PDPTW问题系统包括3个基本对象:地点Location,订单Order,车辆Vehicle,依次读取数据表创建这些对象。接着基于对象信息提取所需数据:(1)所有的虚拟点集合,依次用数字编号,每个节点包含元组信息(订单号,取/送货真实点,取/送货量),奇数为取货,货量为正数,偶数为送货,货量为负数;(2)每辆车可以匹配的订单号集合,可经过虚拟点集合
1
2
3
4
5
6
7
8
9
10
11
12
13
14
# V1
['O1', 'O2', 'O3', 'O5', 'O7', 'O9', 'O10']
[1, 2, 3, 4, 5, 6, 9, 10, 11, 12, 13, 14, 15, 16]
# V2
['O1', 'O2', 'O3', 'O5', 'O7', 'O9', 'O10']
[1, 2, 3, 4, 5, 6, 9, 10, 11, 12, 13, 14, 15, 16]
# V3
['O1', 'O2', 'O3', 'O5', 'O7', 'O9', 'O10', 'O4']
[1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16]
# 虚拟点集合,共8个订单,因此16个虚拟点
{1: ('O1', 'L1', 20), 2: ('O1', 'L2', -20), 3: ('O2', 'L1', 4), 4: ('O2', 'L3', -4), 5: ('O3', 'L1', 10), 6: ('O3', 'L4', -10), 7: ('O4', 'L1', 10), 8: ('O4', 'L5', -10), 9: ('O5', 'L1', 10), 10: ('O5', 'L6', -10), 11: ('O7', 'L1', 10), 12: ('O7', 'L8', -10), 13: ('O9', 'L1', 10), 14: ('O9', 'L10', -10), 15: ('O10', 'L2', 2), 16: ('O10', 'L1', -2)}
(2)求解模型Solver:基于System类的数据信息,开始构建模型并求解
- 添加边变量:对每辆车k,添加0-1变量,表示是否经过边(i,j),边(i,j)来自车辆k可经过虚拟点集合,除了虚拟点,车k还要经过起始点和结束点
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
def add_edge_var(self):
# 变量x_kij: 车辆k是否经过边ij,ij是带order维度的虚拟扩展点,以及车辆的起始点
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
for node_i in veh_obj.alter_node_list:
for node_j in veh_obj.alter_node_list:
if node_i != node_j:
self.x_vars[(veh_k, node_i, node_j)] = LpVariable(name=f'x_{veh_k}_{node_i}_{node_j}',
lowBound=0, upBound=1, cat=LpBinary)
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
node_origin, node_des = 0, self.system.dummy_node_count + 1
for node in veh_obj.alter_node_list:
self.x_vars[(veh_k, node_origin, node)] = LpVariable(name=f'{veh_k}_{node_origin}_{node}',
lowBound=0, upBound=1, cat=LpBinary)
self.x_vars[(veh_k, node, node_des)] = LpVariable(name=f'{veh_k}_{node}_{node_des}',
lowBound=0, upBound=1, cat=LpBinary)
- 添加基本约束:在添加完边变量后,对其有如下约束:(1)保证每个货物都被配送,即对每个取货虚拟点,一定存在某辆车k从该点出发(2)保证取货后要有对应的送货,即车辆k从某个订单的取货虚拟点出发,也要从该订单的送货虚拟点出发(3)路径平衡约束,即每辆车k一定要从起始虚拟点出发,回到结束虚拟点,取送虚拟点的进出边相等。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
def add_basic_cons(self):
# (1) 保证每个货物都被配送:对所有虚拟点中的每个pick点,要求必须存在(pick,j)
for pick_node in self.system.dummy_node_dict.keys():
if pick_node % 2 != 0:
lhs_origin = 0
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
if i == pick_node:
lhs_origin += self.x_vars[key]
self.model += (lhs_origin == 1, f'{pick_node}_pick_cons')
# (3) 保证取货后要有对应的送货:车辆k经过pick点也一定也要经过对应的del点
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
for node in veh_obj.alter_node_list:
if node % 2 != 0:
pick_node, del_node = node, node + 1
lhs_origin, rhs = 0, 0
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
if k == veh_k and i == pick_node:
lhs_origin += self.x_vars[key]
if k == veh_k and i == del_node:
rhs += self.x_vars[key]
self.model += (lhs_origin == rhs, f'{veh_k}_{pick_node}_{del_node}_pair_cons')
# (4) 路径平衡约束:每辆车一定经过从起点出发和回到终点,其他虚拟点要保证有进有出
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
lhs_origin, lhs_des = 0, 0
for node in veh_obj.alter_node_list:
lsh, rhs = 0, 0
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
if k == veh_k and j == node and i == 0:
lhs_origin += self.x_vars[key]
if k == veh_k and i == node and j == (self.system.dummy_node_count + 1):
lhs_des += self.x_vars[key]
if k == veh_k and i == node:
lsh += self.x_vars[key]
if k == veh_k and j == node:
rhs += self.x_vars[key]
self.model += (lsh == rhs, f'{veh_k}_{node}_inout_cons')
self.model += (lhs_origin == 1, f'{veh_k}_origin_cons')
self.model += (lhs_des == 1, f'{veh_k}_des_cons')
- 添加节点变量:上述约束和变量没有反应取送货信息,因此还需要对节点添加一些辅助信息,(1)每辆车到达某虚拟点的载货量(2)每辆车到达虚拟点的时间(3)每辆车在虚拟点的等待时间
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
def add_node_var(self):
# 变量q_ki:车辆k到达点i的载货量
# 变量a_ki:车辆k到达点i的时间
# 变量w_ki:车辆k在点i的等待时间
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
for node_i in veh_obj.alter_node_list:
self.q_vars[(veh_k, node_i)] = LpVariable(name=f'q_{veh_k}_{node_i}', lowBound=0, cat=LpContinuous)
self.a_vars[(veh_k, node_i)] = LpVariable(name=f'a_{veh_k}_{node_i}', lowBound=0, cat=LpContinuous)
self.w_vars[(veh_k, node_i)] = LpVariable(name=f'w_{veh_k}_{node_i}', lowBound=0, cat=LpContinuous)
node_origin, node_des = 0, self.system.dummy_node_count + 1
self.q_vars[(veh_k, node_origin)] = LpVariable(name=f'q_{veh_k}_{node_origin}', lowBound=0, cat=LpContinuous)
self.a_vars[(veh_k, node_origin)] = LpVariable(name=f'a_{veh_k}_{node_origin}', lowBound=0, cat=LpContinuous)
self.w_vars[(veh_k, node_origin)] = LpVariable(name=f'w_{veh_k}_{node_origin}', lowBound=0, cat=LpContinuous)
self.q_vars[(veh_k, node_des)] = LpVariable(name=f'q_{veh_k}_{node_des}', lowBound=0, cat=LpContinuous)
self.a_vars[(veh_k, node_des)] = LpVariable(name=f'a_{veh_k}_{node_des}', lowBound=0, cat=LpContinuous)
self.w_vars[(veh_k, node_des)] = LpVariable(name=f'w_{veh_k}_{node_des}', lowBound=0, cat=LpContinuous)
- 添加负载约束:(1)每辆车经过某个虚拟点,其负载量要加上该节点的取/送货量,因此如果经过边(i,j),那么到达i的负载量+节点j的负载量=到达j的负载量;(2)每辆车到达任何虚拟点,其负载量都不能超过该车的最大载量
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
def add_load_cons(self):
# (5) 负载平衡约束:如果车辆k经过边(i,j),那么到达i的负载量+节点j的负载量=到达j的负载量
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
veh_obj = self.system.vehicle_obj_dict[k]
big_M = 2 * veh_obj.max_load
lhs = self.q_vars[(k, j)]
if i == 0:
rhs = self.q_vars[(k, i)] + (self.x_vars[key] - 1) * big_M
else:
load_i = self.system.dummy_node_dict[i][2]
rhs = self.q_vars[(k, i)] + load_i + (self.x_vars[key] - 1) * big_M
# 为了将约束线性化,引入bigM,必须要用不等式,导致该约束限制不了环路的出现
self.model += (lhs >= rhs, f'{key}_load_balance_cons')
# (6) 负载最大约束:车辆k到达节点i的负载量不能大于最大载量
for key in self.q_vars.keys():
k, i = key[0], key[1]
veh_obj = self.system.vehicle_obj_dict[k]
self.model += (self.q_vars[key] <= veh_obj.max_load, f'{k}_{i}_max_load_cons')
- 添加时间约束:(1)时间窗约束:每辆车在虚拟点开始服务的时间要在时间窗内(2)时间关系约束:如果车辆k经过边(i,j),那么需要满足到达i的时间+等待时间+服务时间+运输时间不能超过到达j的时间,通过时间关系约束可以限制环路
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
def add_time_cons(self):
# (7) 时间平衡约束:如果车辆k经过ij,那么到达j的时间=到达i的时间+在i等待的时间+服务i的时间+运输耗时
# 可以限制环路
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
veh_obj = self.system.vehicle_obj_dict[k]
big_M = 2 * veh_obj.end
if j == self.system.dummy_node_count + 1:
loca_j_name = veh_obj.des
else:
loca_j_name = self.system.dummy_node_dict[j][1]
if i == 0:
loca_i_name = veh_obj.origin
service_i = 0
else:
loca_i_name = self.system.dummy_node_dict[i][1]
order_id = self.system.dummy_node_dict[i][0]
order_obj = self.system.order_obj_dict[order_id]
service_i = order_obj.pick_service
trans_time = round((self.system.dist_matrix[(loca_i_name, loca_j_name)] / veh_obj.speed) * 3600)
lhs = self.a_vars[(k, i)] + self.w_vars[(k, i)] + trans_time + (self.x_vars[key] - 1) * big_M + service_i
self.model += (lhs <= self.a_vars[(k, j)], f'{k}_{i}_{j}_time_balance_cons')
# (8)(9)(10) 时间窗约束
# 车辆k在节点i的等待时间=max(0, 节点i可开始服务的时间-到达节点i的时间)
# 节点i最早开始服务 <= 在节点i的等待时间 + 到达节点i的时间 <= 节点i最晚开始服务
# 起点的到达时间>=车辆的最早开始时间,终点的到达时间<=车辆的最晚时间
# 约束2可以实现约束13,去掉约束1也能避免线性化操作
for key in self.a_vars.keys():
k, i = key[0], key[1]
veh_obj = self.system.vehicle_obj_dict[k]
lhs = self.a_vars[key] + self.w_vars[key]
if i == 0 or i == self.system.dummy_node_count + 1:
self.model += (lhs <= veh_obj.end, f'{k}_{i}_window_end_cons')
self.model += (lhs >= veh_obj.start, f'{k}_{i}_window_start_cons')
else:
order_id = self.system.dummy_node_dict[i][0]
order_obj = self.system.order_obj_dict[order_id]
if i % 2 != 0:
self.model += (lhs <= order_obj.pick_end, f'{k}_{i}_window_end_cons')
self.model += (lhs >= order_obj.pick_start, f'{k}_{i}_window_start_cons')
else:
self.model += (lhs <= order_obj.del_end, f'{k}_{i}_window_end_cons')
self.model += (lhs >= order_obj.del_start, f'{k}_{i}_window_start_cons')
- 添加顺序约束:添加基本约束后可以得到带环路的图,添加负载约束只能部分限制取送顺序,即不超过最大载量即可,添加时间约束后可以消除环路,得到每辆车从起始虚拟点到结束虚拟点的路径,但是存在先送货再取货的情况,因此需要限制车辆到达取货虚拟点和送货虚拟点的顺序,可以通过时间来约束,到达取货虚拟点时间+等待时间+服务时间+取送运输时间不能大于到达送货虚拟点时间
1
2
3
4
5
6
7
8
9
10
11
12
13
def add_seq_cons(self):
# (13) 保证货物先取后送
for key in self.a_vars.keys():
k, i = key[0], key[1]
veh_obj = self.system.vehicle_obj_dict[k]
if i % 2 != 0 and i != 0 and i != (self.system.dummy_node_count + 1):
node_pick, node_del = i, i + 1
order_id, loca_i_name, _ = self.system.dummy_node_dict[node_pick]
loca_j_name = self.system.dummy_node_dict[node_del][1]
order_obj = self.system.order_obj_dict[order_id]
trans_time = round((self.system.dist_matrix[(loca_i_name, loca_j_name)] / veh_obj.speed) * 3600)
lhs = self.a_vars[(k, node_pick)] + self.w_vars[(k, node_pick)] + order_obj.pick_service + trans_time
self.model += (lhs <= self.a_vars[(k, node_del)], f'{k}_{i}_{i + 1}_seq_cons')
- 添加限制约束:上述约束添加后已经可以得到满足要求的车辆调度计划,还可以添加额外的限制约束,(1)最大运输距离限制:计算每辆车的运输总距离,不能超过最大值(2)最大运输时间限制:计算每辆车到达结束虚拟点的时间,不能超过最大时间
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
def add_limit_cons(self):
# (11) 最大运输距离限制:车辆k经过的ij总运输距离不能超过车辆最大距离
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
lhs = 0
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
if k == veh_k:
if j == self.system.dummy_node_count + 1:
loca_j_name = veh_obj.des
else:
loca_j_name = self.system.dummy_node_dict[j][1]
if i == 0:
loca_i_name = veh_obj.origin
else:
loca_i_name = self.system.dummy_node_dict[i][1]
lhs += self.x_vars[key] * self.system.dist_matrix[(loca_i_name, loca_j_name)]
self.model += (lhs <= veh_obj.max_distance, f'{veh_k}_distance_limit_cons')
# (12) 最大运输时间限制:车辆k到达终点的时间-车辆从起点出发的时间不能超过最大时长
for veh_k, veh_obj in self.system.vehicle_obj_dict.items():
time_delta = self.a_vars[(veh_k, self.system.dummy_node_count + 1)] - self.a_vars[(veh_k, 0)]
self.model += (time_delta <= (veh_obj.max_time * 3600), f'{veh_k}_time_limit_cons')
- 添加目标函数:用每辆车的单位运输成本乘上运输距离即可
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
def add_trans_cost_objs(self):
# 对于变量kij,找到ij的距离和k的单位运输成本,即可计算总运输成本
for key in self.x_vars.keys():
k, i, j = key[0], key[1], key[2]
veh_obj = self.system.vehicle_obj_dict[k]
if i == 0:
loca_i_name = veh_obj.origin
else:
loca_i_name = self.system.dummy_node_dict[i][1]
if j == len(self.system.dummy_node_dict) + 1:
loca_j_name = veh_obj.des
else:
loca_j_name = self.system.dummy_node_dict[j][1]
if loca_i_name != loca_j_name:
dist = self.system.dist_matrix[(loca_i_name, loca_j_name)]
self.objs += self.x_vars[key] * veh_obj.unit_cost * dist
self.model += (self.objs, f'minimize_transport_cost')
5.求解结果
求解参数设置:NoRelHeurTime是一种启发式算法,可以提前找到一个可行解,对于大规模混合整数线性规划问题,提前拿到第一个可行解是非常非常有助于整个Branch and Cut的搜索过程的
1
2
NoRelHeurTime = 400 # 控制启发式算法的时间限制
timeLimit = 600 # 控制求解器求解时间限制
1000s后找到gap为45%的最优解,与官方给出代码运行效果基本一致,求解的调度计划也一致
1
2
3
4
5
6
7
Explored 664725 nodes (14855641 simplex iterations) in 600.01 seconds (680.73 work units)
Thread count was 8 (of 8 available processors)
Solution count 10: 846.682 846.682 846.682 ... 876.259
Time limit reached
Best objective 8.466817613171e+02, best bound 4.627762720459e+02, gap 45.3424%
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
车辆id,停靠点,订单id,到达时间,离开时间,地点类型,到达载货量,载货变动量
V1,L1,,2017-01-06 07:00:00,2017-01-06 07:00:00,起点,0.0,
V1,L1,O6,2017-01-06 07:00:00,2017-01-06 08:00:00,取货,0.0,20.0
V1,L7,O6,2017-01-06 08:12:26,2017-01-06 09:12:26,送货,20.0,-20.0
V1,L1,O5,2017-01-06 09:24:52,2017-01-06 10:24:52,取货,0.0,10.0
V1,L1,O2,2017-01-06 10:24:52,2017-01-06 11:24:52,取货,10.0,4.0
V1,L1,O7,2017-01-06 11:24:52,2017-01-06 12:24:52,取货,14.0,10.0
V1,L6,O5,2017-01-06 12:44:53,2017-01-06 13:44:53,送货,24.0,-10.0
V1,L8,O7,2017-01-06 13:49:52,2017-01-06 14:49:52,送货,14.0,-10.0
V1,L3,O2,2017-01-06 15:00:00,2017-01-06 16:00:00,送货,4.0,-4.0
V1,L1,,2017-01-06 16:26:36,2017-01-06 16:26:36,终点,0.0,
V2,L1,,2017-01-06 07:00:00,2017-01-06 07:00:00,起点,0.0,
V2,L1,O1,2017-01-06 07:00:07,2017-01-06 08:00:07,取货,0.0,20.0
V2,L2,O1,2017-01-06 08:15:40,2017-01-06 09:15:40,送货,20.0,-20.0
V2,L2,O10,2017-01-06 09:15:40,2017-01-06 10:15:40,取货,0.0,2.0
V2,L1,O10,2017-01-06 10:31:13,2017-01-06 11:31:13,送货,2.0,-2.0
V2,L1,O9,2017-01-06 11:31:13,2017-01-06 12:31:13,取货,0.0,10.0
V2,L1,O3,2017-01-06 12:31:13,2017-01-06 13:31:13,取货,10.0,10.0
V2,L10,O9,2017-01-06 13:56:10,2017-01-06 14:56:10,送货,20.0,-10.0
V2,L4,O3,2017-01-06 15:00:00,2017-01-06 16:00:00,送货,10.0,-10.0
V2,L1,,2017-01-06 16:26:36,2017-01-06 16:26:36,终点,0.0,
V3,L1,,2017-01-06 07:00:00,2017-01-06 07:00:00,起点,0.0,
V3,L1,O4,2017-01-06 07:00:00,2017-01-06 08:00:00,取货,0.0,10.0
V3,L5,O4,2017-01-06 08:44:45,2017-01-06 09:44:45,送货,10.0,-10.0
V3,L1,O8,2017-01-06 10:29:30,2017-01-06 11:29:30,取货,0.0,10.0
V3,L9,O8,2017-01-06 11:52:29,2017-01-06 12:52:29,送货,10.0,-10.0
V3,L1,,2017-01-06 16:44:45,2017-01-06 16:44:45,终点,0.0,
PDPTW在如此小规模问题下都需要较长求解时间,求解时间是比较长的,在实际应用中,车辆调度次数比较频繁,约束更复杂,因此往往采用启发式算法来实现,能比较快的找到一个次优解。